
Planning and Execution for a Mobile Indoor Robot
The goal of this use-case is to explore and demonstrate how task planning and execution can be used to control a mobile robot for manipulation tasks in an indoor environment.
The goal of this use-case is to explore and demonstrate how task planning and execution can be used to control a mobile robot for manipulation tasks in an indoor environment.


The goal of the UPF4ROS2 case study is to enable the use of Unified Planning Framework (UPF) at ROS 2 (Robot Operating System). The project will employ a technological approach based on the utilization of Managed Nodes introduced in ROS 2. These nodes po...
Staff activity planner for nursing homes, able to optimally handle emergency and unexpected events.

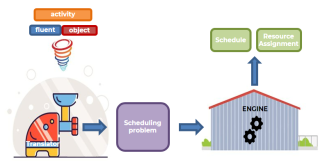
This asset provides the interfacing between the PPS scheduling engine developed by ACTOR and the Unified Planning framework developed by the AIPlan4EU project.

This asset provides the interfacing between the PURPLE engine and the Unified Planning framework developed by the AIPlan4EU project.
This asset provides the interfacing between the SIADEX temporal hierarchical planner, and the Unified Planning framework developed by the AIPlan4EU project.
MyFoodPlace, the use-case provider, is the largest Central European Kitchen-as-a-Service KaaS provider reaching a yearly revenue of millions of euros. Filuta AI, the Technology Specific Bridge Developer, is the decision-making partner, providing MyFoodPla...
MyFoodPlace, the use-case provider, is the largest Central European Kitchen-as-a-Service (KaaS) provider reaching a yearly revenue of millions of euros. Filuta AI, the Technology Specific Bridge Developer, is the decision-making partner, providing MyFoodP...